Introduction
Hand gesture recognition has been a very active research topic in recent years with motivating applications such as human computer interaction (HCI), robot control, and sign language interpretation. In the past most of the research in this field has been focused on Vision Based hand gesture recognition. Vision based recognition is quite challenging due a number of issues including the complicated nature of static and dynamic hand gestures, complex backgrounds, and occlusions. Attacking the problem in its generality requires elaborate algorithms requiring intensive computer resources.
The development of the Wiimote by Nintendo has ushered in a new wave of research and development in the field of Human Computer Interaction. This is mostly attributed to the accelerometer feature of the Wiimote which makes interacting as natural as it can be.
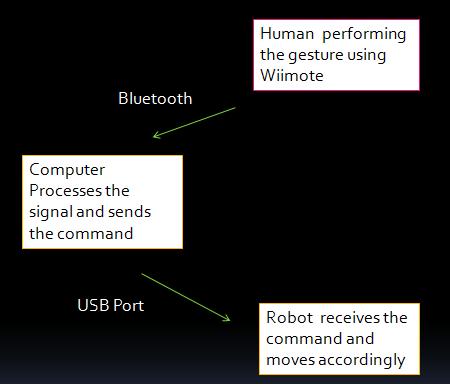
So, in this project I have implemented a robotic system(Laptop + LEGO® MINDSTORMS® NXT brick) that can be controlled using Wiimote Getures. The picture below shows the block diagram for the system .
I have used two
approaches to accomplish this, the first one just reads the X, Y, Z
acceleration values for the wiimote and tries to deduce the gesture
from them using a range of acceleration values for a particular
gesture. The second approach reads the X,Y, Z acceleration values for
3 seconds and and then feeds this data to a Neural Network which then
analyzes it and tells the gesture made.
I have used Matlab R2008a for programming. Alongwith that I have used WiiLab[1] Sofware package developed at the University of Note Dame for reading and analyzing Wiimote acceleration data in MATLAB and RWTH - Mindstorms NXT Toolbox for MATLAB® develpoed at Institute of Imaging and Computer Vision, RWTH Aachen University [2].